中国公司做出一块能“感觉”的布,在X上火了量子位
中国公司做出一块能“感觉”的布,在X上火了!
它由高密度纤维和纺织传感器编织而成,可以实时检测压力、触摸、变形和细微的接触变化。
无论你如何抓揉、按压、触碰、拍打,甚至拿锤子敲它,或者在上面写字,传感器都能给出实时精准的压力变化反馈。
如果把它穿在人形机器人身上,尤其是套在灵巧手上,那么机器人就真正能够感知和触摸世界。
做出这款神奇电子皮肤的,是一家中国公司——矩侨工业。
2025年,他们在B站发布了《做了一件有触觉的衣服》《做了一副有触觉的手套》等一系列视频,详细展示了机器人穿上电子皮肤的玩法。
比如灵巧手触觉。
戴上这种布做的手套,机器人拿起一支笔或一颗小番茄,指尖都会感受到压力变化。
全掌同样有压力监测。
如果拿起一杯水,机器人会感到掌心传来的压力变化。
如果握紧手中的物品,就可以动态测量握力变化。
即便是吹风筒吹出的风这样的气流变化,机器人也可以感知到。
好家伙,这下机器人是真的拥有触觉了。
而且这款电子皮肤还可以进行动态遥操,让机器人比划出相应的手势。
如果你跟它握手,它可以感知到你做出了不同的手势。
再脑洞大开一下,如果以后给机器人植入情感信号,让它明白握手是友好的意思,那肢体动作的情感表达不也能解锁了吗?
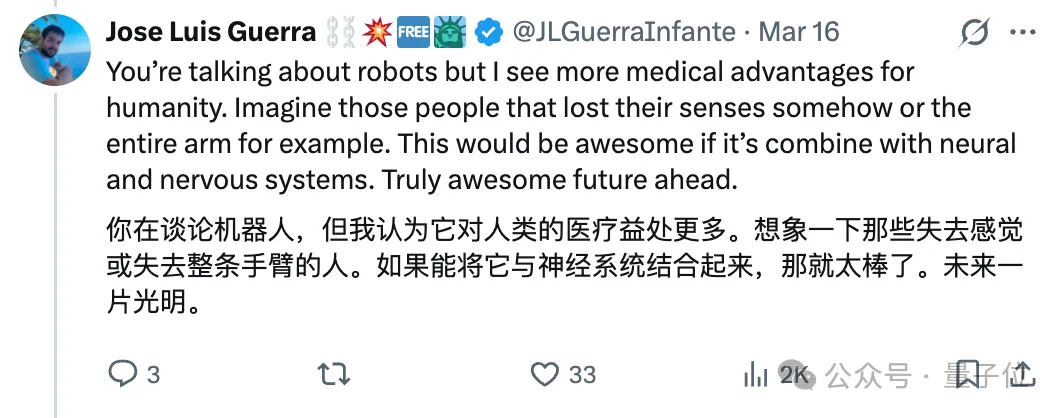
X上的网友的脑洞那就更多了:
它对人类医疗也有好处,比如帮助那些丧失神经感知或失去整条手臂的人重新找回触觉。
还有老哥提出一个更疯狂的方向——
如果把这套电子皮肤做成仿生手,再接入脑机接口,那意义就完全不一样了。
一般的假肢只能做到抓握、抬起等动作,但缺乏感觉反馈。
而一旦电子皮肤能够把压力、触感、甚至温度转化为电信号,再通过脑机接口回传给大脑,人类就有可能重新“感觉到”那只手的存在。
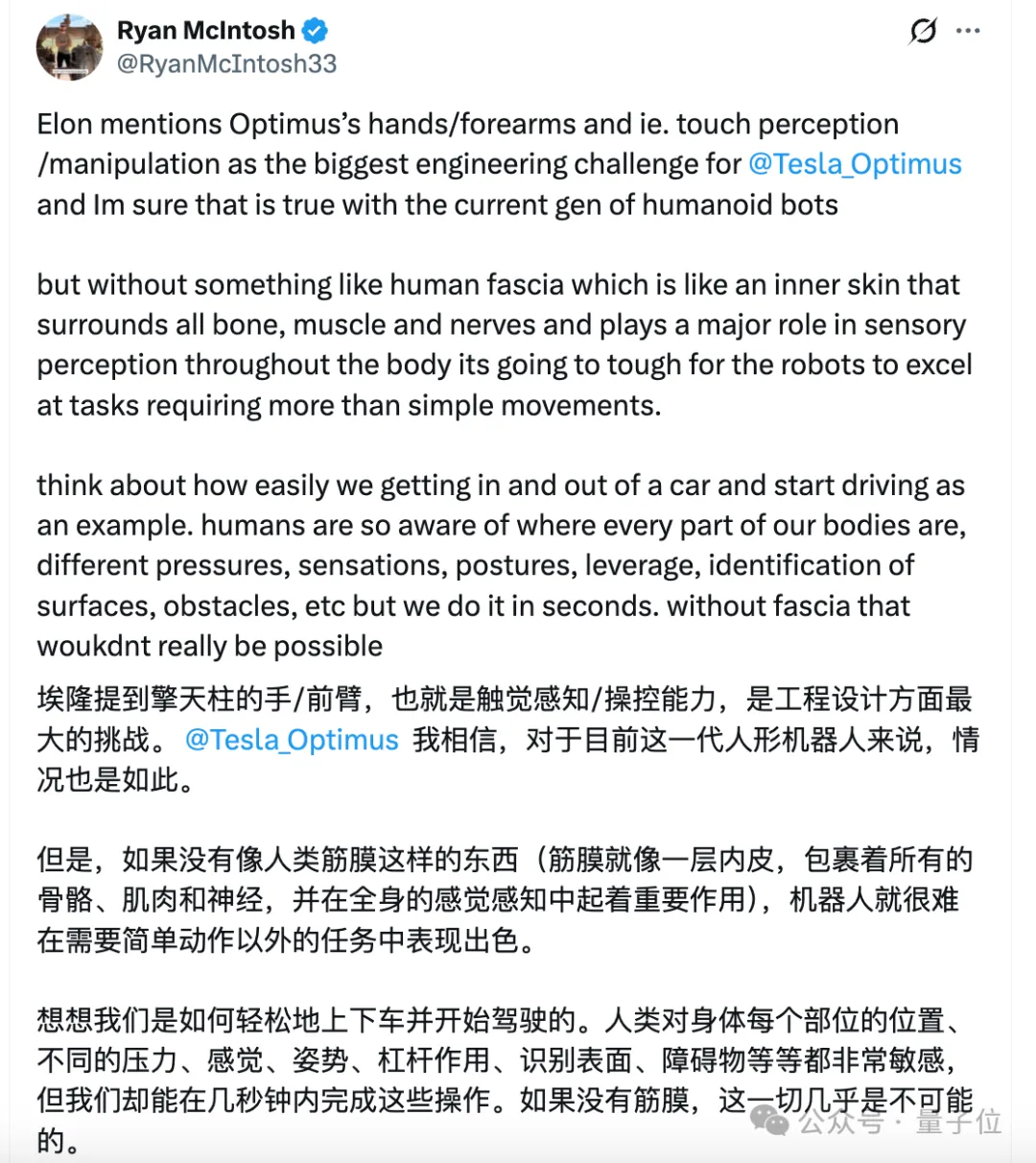
有意思的是,马斯克也曾提到过人形机器人Optimus最难的部分其实不是大模型,也不是运动控制。
就是手部和前臂。
人类的手,既是最精密的执行器,也是最敏感的传感器。
你可以用手轻轻捏起一颗小番茄,也可以稳稳握住一杯水,这背后依赖的是毫秒级的触觉反馈+动态力控制闭环。
而这一点,恰恰是当前大多数机器人最薄弱的环节。
电子皮肤,让机器人有触觉了
电子皮肤(Electronic Skin, E-skin),本质上是一种模仿人类皮肤感知功能的柔性传感器系统。
与传统刚性传感器不同,电子皮肤需要同时具备柔韧性、延展性、灵敏度和多模态感知能力,以适应复杂曲面的贴附需求和动态环境下的可靠工作。
矩侨工业的核心技术是柔性纤维传感器技术,目前已经研发出了第四代柔性纤维传感器。
这是一种将传感功能与纺织纤维深度融合的创新形态。
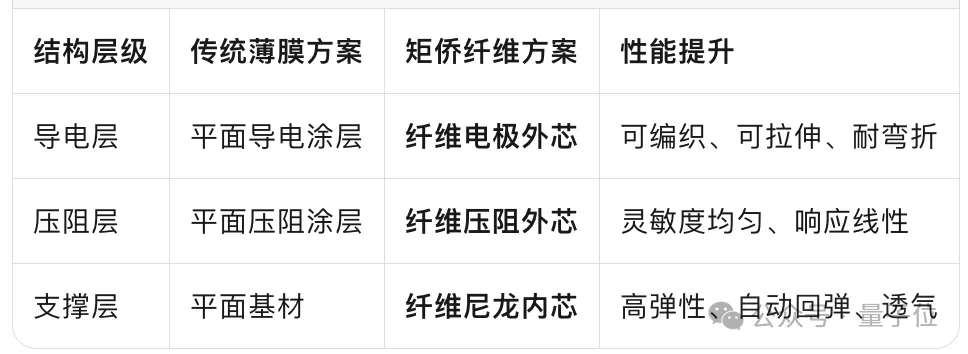
传统的薄膜压力传感器采用的是“三明治”平面结构:导电涂层、压阻涂层、涂层基材三层堆叠。
而矩侨的创新方案将三层结构完全解构为纤维化形态:纤维尼龙内芯+纤维压阻外芯+纤维电极外芯。
这使得传感器从根本上具备了纺织品的物理特性:可编织成任意形状、可拉伸变形后自动恢复、可透气排汗、可耐受反复弯折。
矩侨的电子皮肤还有一个非常直观的技术突破:可死折特性——最小折叠半径小于0.1毫米。
这意味着它可以像普通布料一样任意折叠、揉搓,而不会损伤传感性能。
目前这款电子皮肤已经实现了压力、张力、心电信号的感知,下一代2.0产品将扩展至多维力感知(含剪切力)、温湿度检测。
官方打出了“纤维本身就是传感器”的口号,比如把一只手或一个杯子放在织物上进行按压,可以实时监控压力变化。
这样的传感纤维可以做出上衣、手套或足套,如果穿在机器人身上,那玩法可就多了。