中国第一家脑机接口独角兽:超越人手量子位
什么?一家做脑机接口的公司,也跑来做灵巧手了?
来,先看 demo!
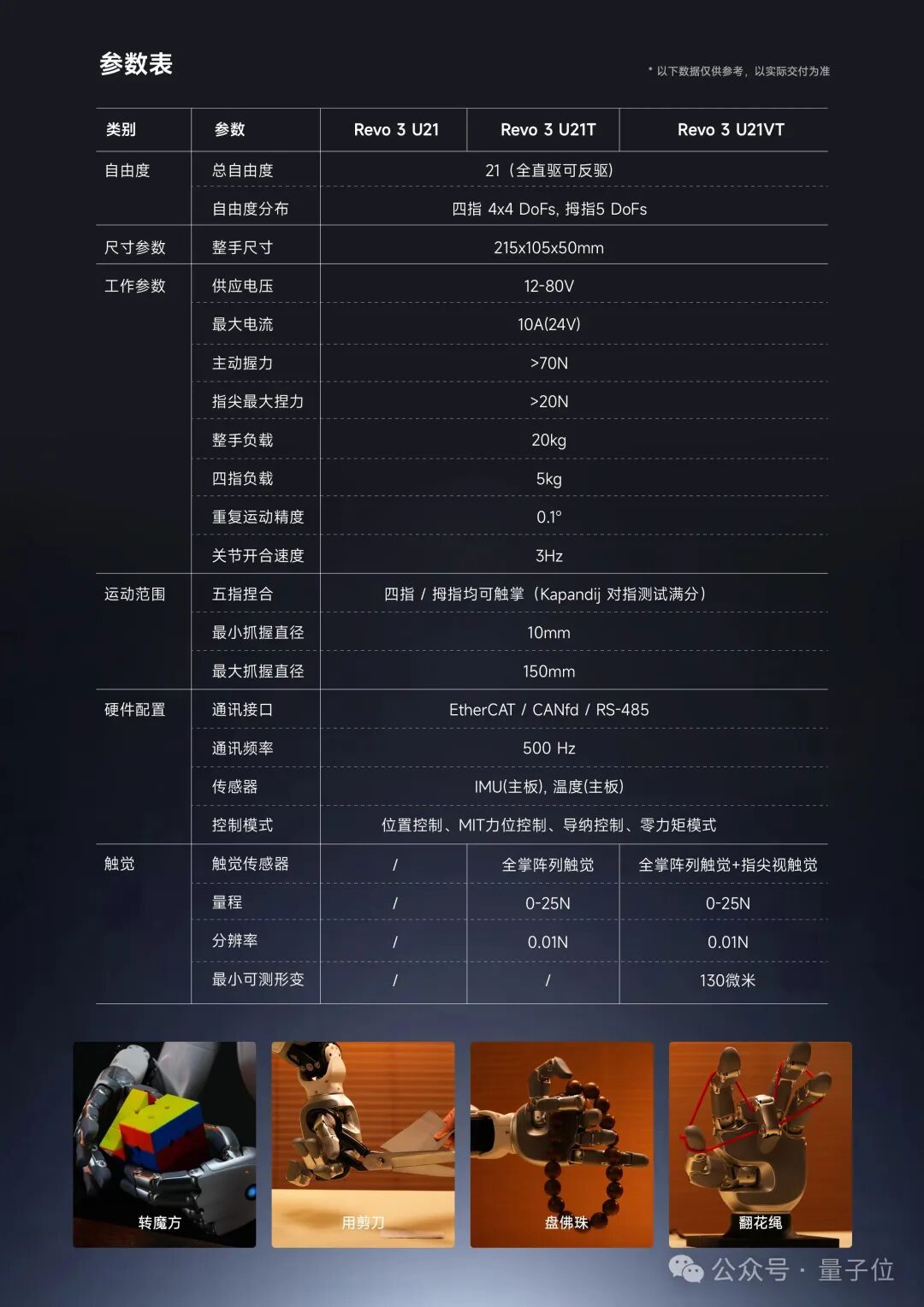
这只手不仅能拉花绳、勾五角星。
(实话讲,这绳玩得给我看愣了)
还能使用剪刀整齐地剪开纸张,双手配合拼魔方。
这究竟是给人用的仿生手,还是给机器人用的灵巧手?
之所以这么问,是因为这只灵巧手来自,以脑机接口闻名的、杭州六小龙之一的强脑科技。
而 demo 里的手,就是他们最新的灵巧手产品 ——Revo 3。
Revo 3:一只水桶手
先说结论:这次新发布的 Revo 3 是一只 “水桶手”。
水桶这个词,在这里并不是贬义。在灵巧手赛道里,大多数玩家的产品策略是把某一个参数做到极致 —— 自由度最多、触觉最灵敏、或者价格最低,用单项指标打出差异化。
自由度:硬件不能拖算法的后腿
自由度是灵巧手当下最热的争议点,但它的意义经常被误解。
自由度不是越多越好,也不是越少越省事,它决定了具身算法的上限。
具身智能的主流训练路径,是让人手示范一遍,再让机器人模仿。
如果机器手的自由度不够,人手能做的动作它结构上就是做不到,训练再久也没用。
反驱:有结构没有控制,还是白搭
自由度解决了灵巧手能不能做的问题,但做得好不好,靠的是控制策略。
在硬件架构上,Revo 3 用全直驱与可反驱重构了控制层的底层逻辑。
区别于传统的绳驱、连杆等驱动方案,Revo 3 采用全直驱一体化微型关节,配合自研高密度电机与减速器,把驱控板压进手掌,实现了微型化与高功率密度的兼顾。
这套设计消除了复杂传动链,减少磨损与滞后,响应频率达到 3Hz 级的高速开合。
这里需要重点关注的,是可反驱特性。
因为在操作中,决定一只手 “好不好用” 的,不只是能动多少关节,而是接触瞬间能不能 “让一下”。
灵巧手如果关节过于刚性,哪怕自由度够高,很多动作也训练不出来。
原因在于,具身智能主流的训练方式之一 —— 强化学习,严重依赖仿真环境。
仿真里,接触被默认是 “可顺应” 的,控制策略会假设手在接触物体时能灵活调整力量。
但如果真实硬件的关节完全刚性,一落地就会出现接触力过大、卡死、震荡等问题,仿真里练好的策略在真机上基本废掉。
这就是 sim-to-real gap 的核心来源之一,而反驱,正是弥合这个 gap 的关键。
Revo 3 采用的全直驱 + 反驱方案,让每个关节都具备力反馈能力。
在遇到外部阻力时,电机能顺应外力回退,而不是硬刚 —— 这不只是防撞,更重要的是让机器手在接触过程中能实时调整力量,实现真正意义上的柔顺力控。
用强脑的话说,反驱最大的好处不是防撞,而是让训练变得更友好。
仿真里能跑通的,真机上大概率也能跑通。这一步,让 Revo 3 从能动变成了能练。
触觉融合:能控制,但看不见摸不着
结构问题解决了,控制策略能迁移了,还有最后一个缺口:感知。
灵巧手长期被戏称为 “没轻没重”,原因很简单:算法只能靠外部摄像头看动作,手本身感知不到是否滑落、是否压坏、是否对齐。
Revo 3 的解法是两套系统同时上:
全掌触觉阵列负责实时感知物体轮廓、软硬与滑动方向;
指尖视觉传感器负责预抓取阶段的亚毫米级对齐,相当于在手指上装了眼睛。
两者合在一起,形成局部感知闭环:算法不再需要靠全局摄像头加大模型来猜测接触状态,手本身就能告诉它 “现在抓稳了”“正在往下滑”“偏了一点点”。
穿针引线、精细装配这类任务,成功率因此大幅提升。
价格与耐用性:让机器人先把手用起来
价格与耐用性,是 Revo 3 从好看的展台走向真实可用的最后一道门槛。
众所周知,目前行业内部分高端灵巧手,在把性能推到极致的同时,也把价格门槛抬到了大多数开发者难以触及的位置。
但问题在于,太贵的手,很难被真正用起来。进不了真实场景,也就难以进入开发者与厂商共同迭代的正循环。
相比之下,强脑认为,一双价格更可承受、同时足够耐用的手,反而更有机会被反复使用、不断打磨。
而在耐用性上,Revo 3 将延续对标二代手的标准,整体表现处于行业较优区间。
在开发者生态方面,强脑计划开源具身算法,目标是让用户买回来半天之内就能跑起来;