机器人仅凭“手感”就能判断番茄成熟度中国科学报
12/26/2025
不用看、只用摸,仅凭“手感”,就能判断一颗番茄的成熟度。现在,机械手正在习得这种人类经验。它所依赖的,是一款特制的“电子皮肤”。近日,中国科学院自动化研究所(以下简称自动化所)研究员程龙团队研发了一款“触觉—接近觉”双模光电传感器,并提出一套通用的“接近—触觉伺服控制框架”,为下一代机器人提供了这种“皮肤感知”能力。
近日,相关工作以“一种触觉—接近双模光电传感器的实现及应用”(A Tactile-Proximity Dual-Mode Photoelectric Sensor: Implementation and Applications)为题,在线发表于IEEE TRANSACTIONS ON ROBOTICS期刊。
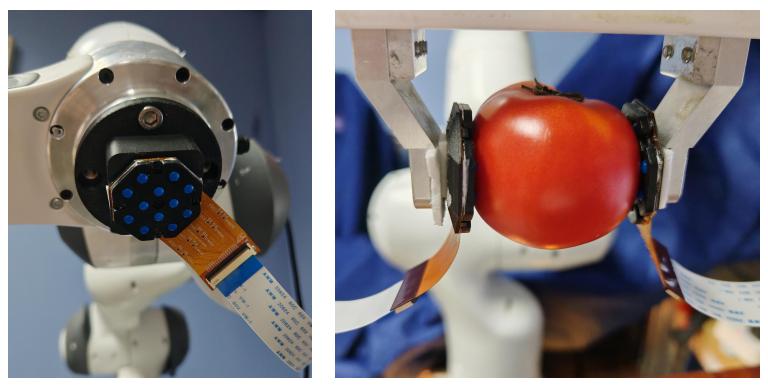
触觉-接近觉双模光电传感器展示。自动化所 供图
在人机交互和智能操作任务中,触觉与接近觉(非接触式感知)至关重要。机器人不仅需要“能看”,更需要“可摸”和“可感”。然而,目前大部分机器人传感器只能实现“碰到才知”(纯触觉),或者只能“远远看着”(纯接近觉)。有些双模传感器虽然试图兼顾两者,却常常面临体积庞大、易受环境干扰、不同感知模式互相串扰等问题。更进一步地,很多设计无法在同一个器件内独立、稳定地运行两种感知模式,导致机器人在复杂任务中“手忙脚乱”。
为解决这些难题,自动化所团队另辟蹊径,全部采用光电原理研发了该款触觉—接近觉双模光电传感器,通过两种不同结构实现双模感知。其中,触觉靠“可变光路”,即外力使柔性盖板下压,遮挡红外光路,光强变化转化为压力信号;接近觉靠“表面反光”,发射红外光并接收物体反射光,通过光强判断距离和表面属性(如颜色、光滑度)。两种感知模式互不干扰,可以同时有序运行。