中国首个:人形机器人“大脑”领域重大突破红星新闻
和人类的大脑一样,机器人的大脑是主控制器,也是最核心的部件。5月12日,红星新闻记者从成都人形机器人创新中心了解到,该中心在人形机器人“大脑”领域实现重大突破,发布中国首个基于流形拓扑保持的机器人世界模型Manifold Topology-Preserving Based Robot World Model(MTPR-WM)。
据了解,该模型旨在为机器人构建一个能深刻理解物理世界连接、空间与规则的高效“大脑”,使其摆脱传统AI模型的“像素化”感知局限,首次获得接近人类的“空间直觉”与物理推理能力,从而在复杂动态环境中实现快速、安全、可靠的决策与行动。
传统生成式架构的具身智能模型(如VLA)存在一定程度的“模型幻觉-Model Hallucination”,如大语言模型每次回答的问题答案都是不确定的,因此在使用这类模型处理机器人任务时,无法有效保障人、机器、环境的安全,成为业界痛点。
破局之道在于从“生成”到“预测”。据介绍,与生成式模型产生的数据基础不同,世界模型通过动作作用在环境和物体上来“预测”其未来环境和物体的状态,而不是“生成”未来的状态,因此结果具有“确定性”,也就有了“泛化能力”。因此,世界模型是具备对物理世界理解和预测的全新架构,也是人形机器人技术收敛的最大可能方向。
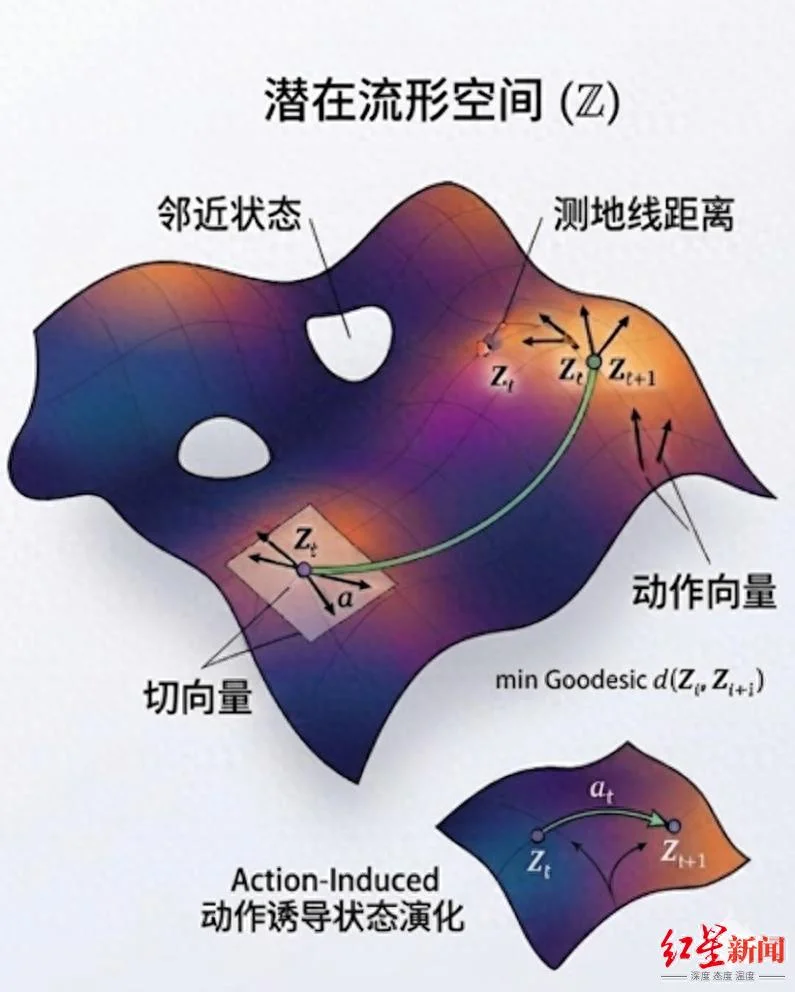
流形原理示意图
记者了解到,成都人形机器人创新中心作为最早投入世界模型核心技术研发的团队,已于2025年8月首发中国首个基于世界模型的机器人任务执行系统(R-WMES)。此次发布的中国首个基于流形拓扑保持的机器人世界模型,其原理是通过流形实现对高维物理世界的状态描述映射到低维空间进行有效编码,实现机器人在隐空间(Latent Space)规划中符合自然界物理规律,不会出现VLA这类架构导致的物理碰撞、穿越、重叠等不符合自然规律的问题。 据介绍,空间占据关系(Occupancy)是世界模型物理性的基石。在该框架下,机器人不仅能识别出障碍物的存在,还能感知到物体边界的平滑演变。这种模型赋予了机器人物理意义上的泛化能力,即对空间结构本质的深刻理解。随着几何深度学习的进一步突破,这种流形大脑将成为具身智能体从“感知机器”进化为“物理智能体”的核心支撑。
“我们将持续引领具身智能世界模型的核心技术突破,并推动其在机器人本体矩阵中的应用,让机器人更聪明,推动机器人走进千家万户。”成都人形机器人创新中心有关负责人表示。