苏昊回国任教复旦:通用物理AI院长量子位
具身智能领域论文被引次数最高的华人学者,带着十七年海外积淀,回来了。
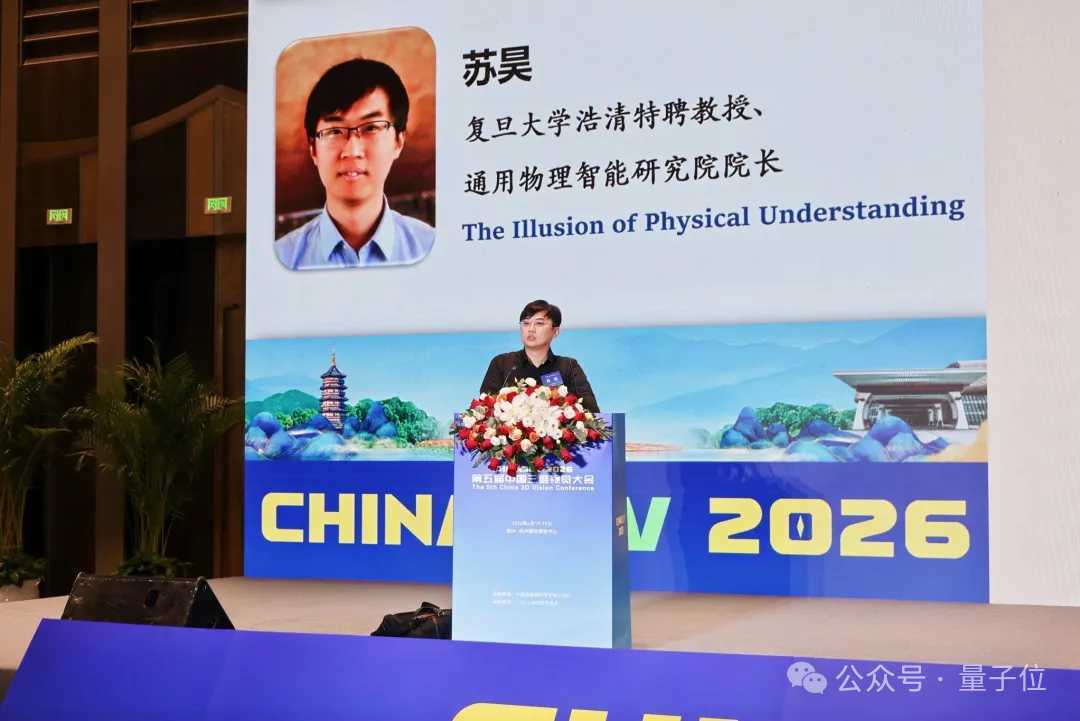
刚刚,在第五届中国三维视觉大会(China3DV 2026)上,李飞飞弟子、ImageNet 作者苏昊正式被复旦官宣加盟。
加盟复旦后,苏昊将担任浩清特聘教授,领衔建设通用物理智能研究院并出任院长。
△图源:复旦大学官方公众号
对于苏昊的回归,复旦大学官方将其定义为复旦 “面向智能时代的关键落子”。
实际上,早在官宣之前,UCSD 和复旦校内已有传言流出,称具身智能领域的领跑者苏昊即将赴复旦任教。
如今靴子落地,坐实了这一场备受期待的回国。
苏昊,具身智能领域论文被引次数最高的华人学者,ImageNet 缔造者之一,ShapeNet、PointNet、PartNet、SAPIEN、ManiSkill 等一众奠基级项目的主导者,具身智能公司 Hillbot 联合创始人兼 CTO。
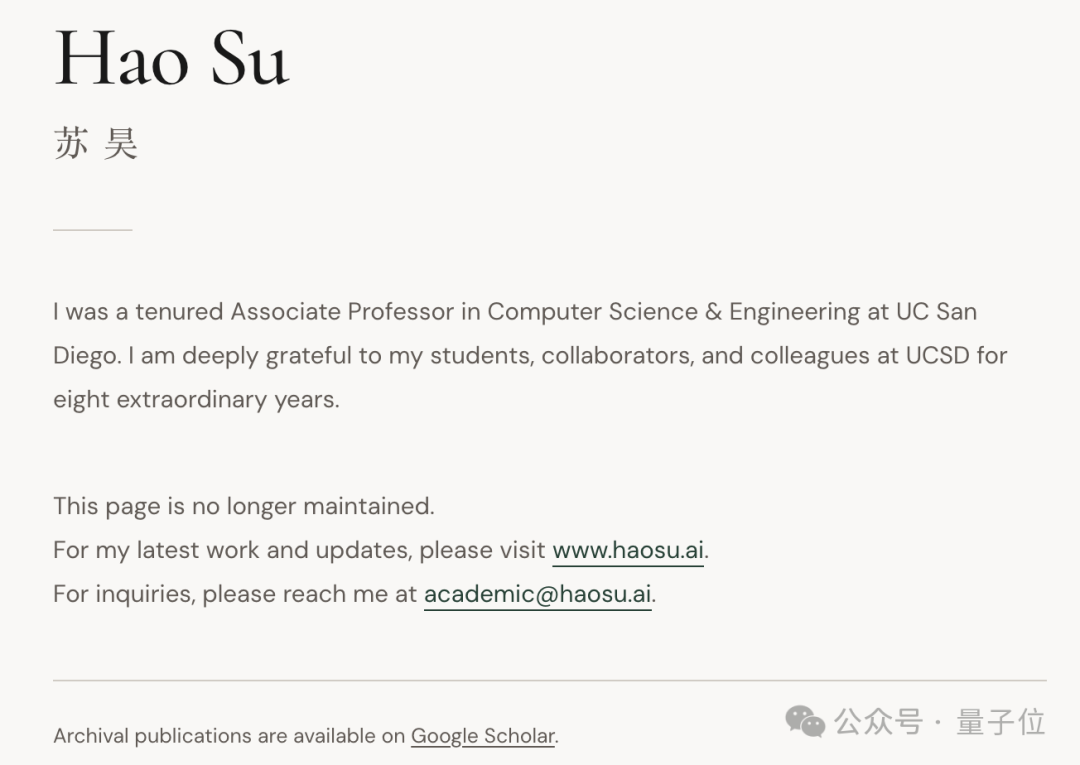
在此之前,他是加州大学圣地亚哥分校(UCSD)计算机科学与工程系副教授,同时还是具身智能实验室主任。
早前,苏昊在 UCSD 的个人主页已经停止维护、不再更新。
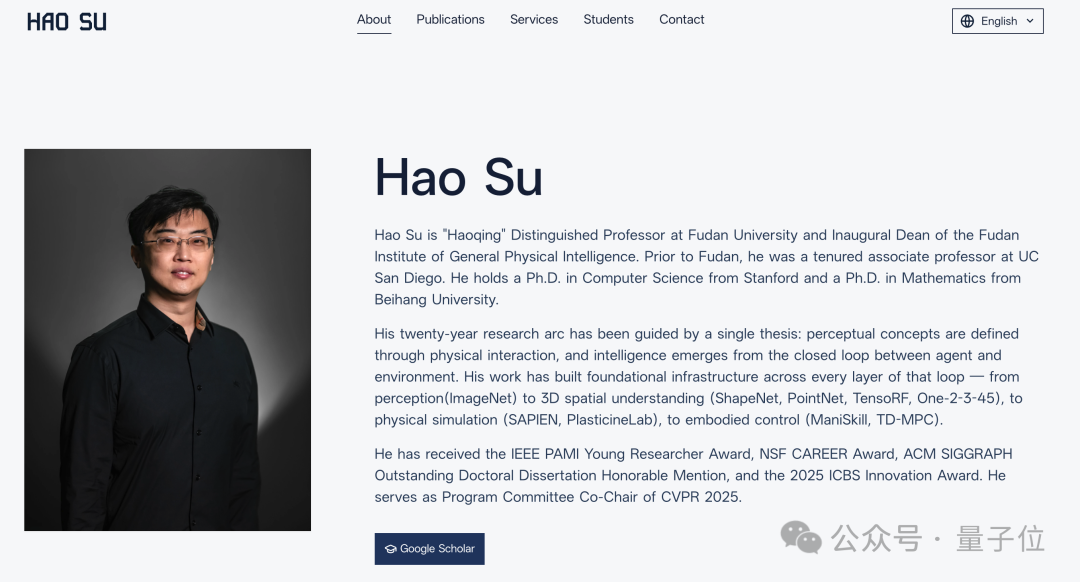
在苏昊新的个人主页上,已经更新了在复旦的最新任职。
截至目前,其谷歌学术被引次数超过 14.5 万次,在具身 AI 领域的华人学者中排名第一。
从北航到普林斯顿,再到斯坦福
2002 年,苏昊进入北京航空航天大学攻读计算机科学本科,是北航高等理工学院的第一届学员。
本科期间,他师从中科院院士、前北航校长李未教授,研究数理逻辑与定理自动证明。
2005 年,经李未教授推荐,他前往微软亚洲研究院(MSRA)实习,师从孙剑、沈向洋、周明。
彼时他主攻自然语言处理,但随着研究深入,他逐渐意识到,相较于抽象的语言,直接来自物理世界的信号(如视觉)才是理解智能更根本的途径。
苏昊的研究重心,也由此转向计算机视觉。
2008 年,在沈向洋的推荐下,苏昊先后在普林斯顿和斯坦福参与了 ImageNet 项目,并在 2009 年跟随李飞飞正式转入斯坦福。
ImageNet 这一奠基性数据集,后来推动了近二十年的人工智能浪潮。
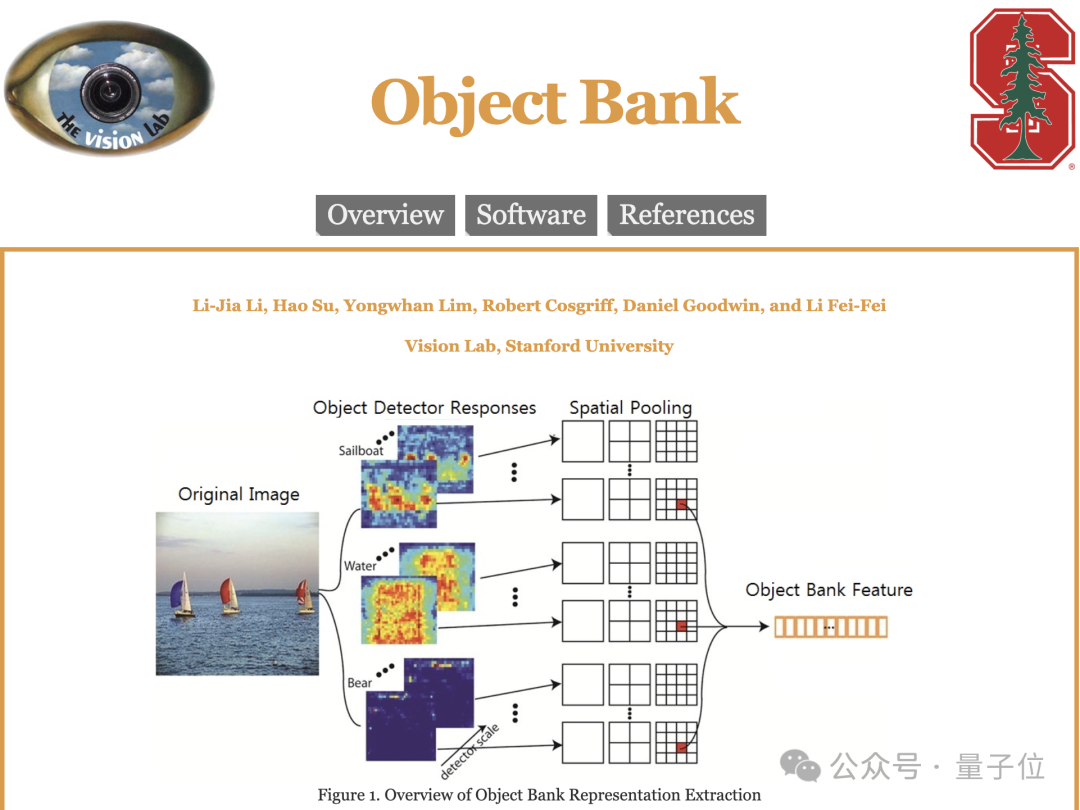
在 ImageNet 之后,苏昊与李佳合作了 Object Bank,进一步提升了图像在高层视觉任务中的语义表示能力,使得简单分类器也能在物体识别和场景分类等任务上取得优异性能,这篇研究发表于 2010 年的 NIPS 上。
3D 视觉的奠基人
当 2D 视觉的方法论日趋完善后,苏昊将目光转向 3D 视觉。
2014 年,在获得北航数学博士学位后的他,在 Leonidas Guibas 指导下于斯坦福攻读计算机博士,主攻三维感知。
2015 年,他发布 ShapeNet—— 全球第一个大规模 3D 数据集,包含逾 300 万个 3D CAD 模型,涵盖 3135 个类别,被外界誉为 “3D 领域的 ImageNet”。
ShapeNet 发布后,3D 视觉研究随即进入黄金发展期。
2017 年,PointNet 与 PointNet++ 相继发布,让 3D 视觉相关论文在顶会的占比从不足 10% 跃升至 70%。
其中 PointNet 是首个直接处理原始点云数据的深度学习模型,而 PointNet++ 则进一步捕捉点云中的局部结构信息。
这两项工作,如今已广泛应用于自动驾驶系统。
2018 年获得斯坦福计算机博士后,苏昊又发布了 3D 物体数据集 PartNet,并入职加州大学圣地亚哥分校。
从视觉到具身
感知之后,苏昊的下一个问题是,能不能把具体的感知算法整合进一个更大的系统?
这一思考,驱动他从计算机视觉迁移到机器人研究。
2020 年,他基于 PartNet 发布了全球第一个以可泛化操作为核心的模拟器 ——SAPIEN(命名灵感来自《人类简史》中的 “智人”),为机器人视觉与交互任务的研究搭建了关键基础设施。
2021 年,他又在此基础上推出 ManiSkill 机器人操作仿真平台,用于测试和训练机器人操作技能。