哈工大系闯出人形机器人黑马量子位
就在刚刚,人形机器人赛道投下了一颗“开源炸弹”。
1月15日,萝博派对(Roboparty)正式在官方GitHub仓库放出了大招——
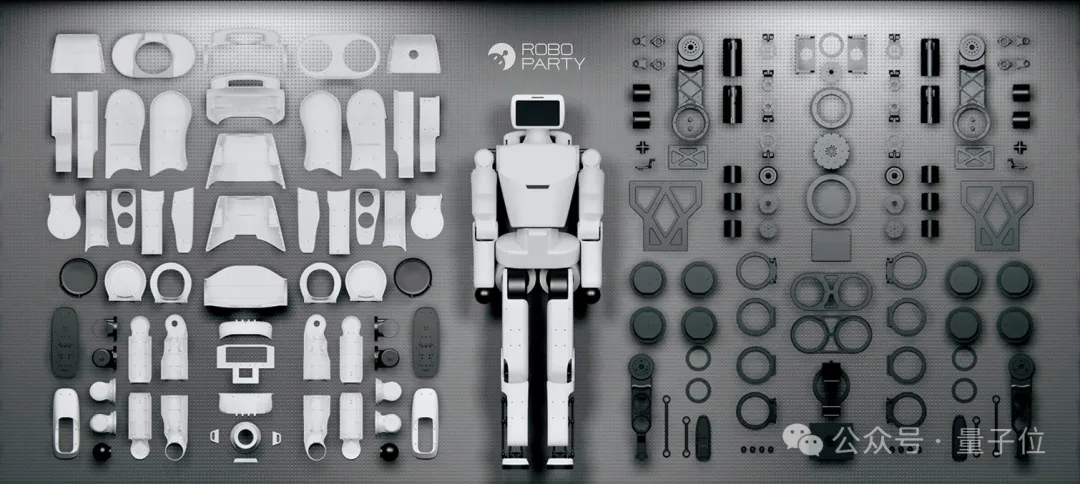
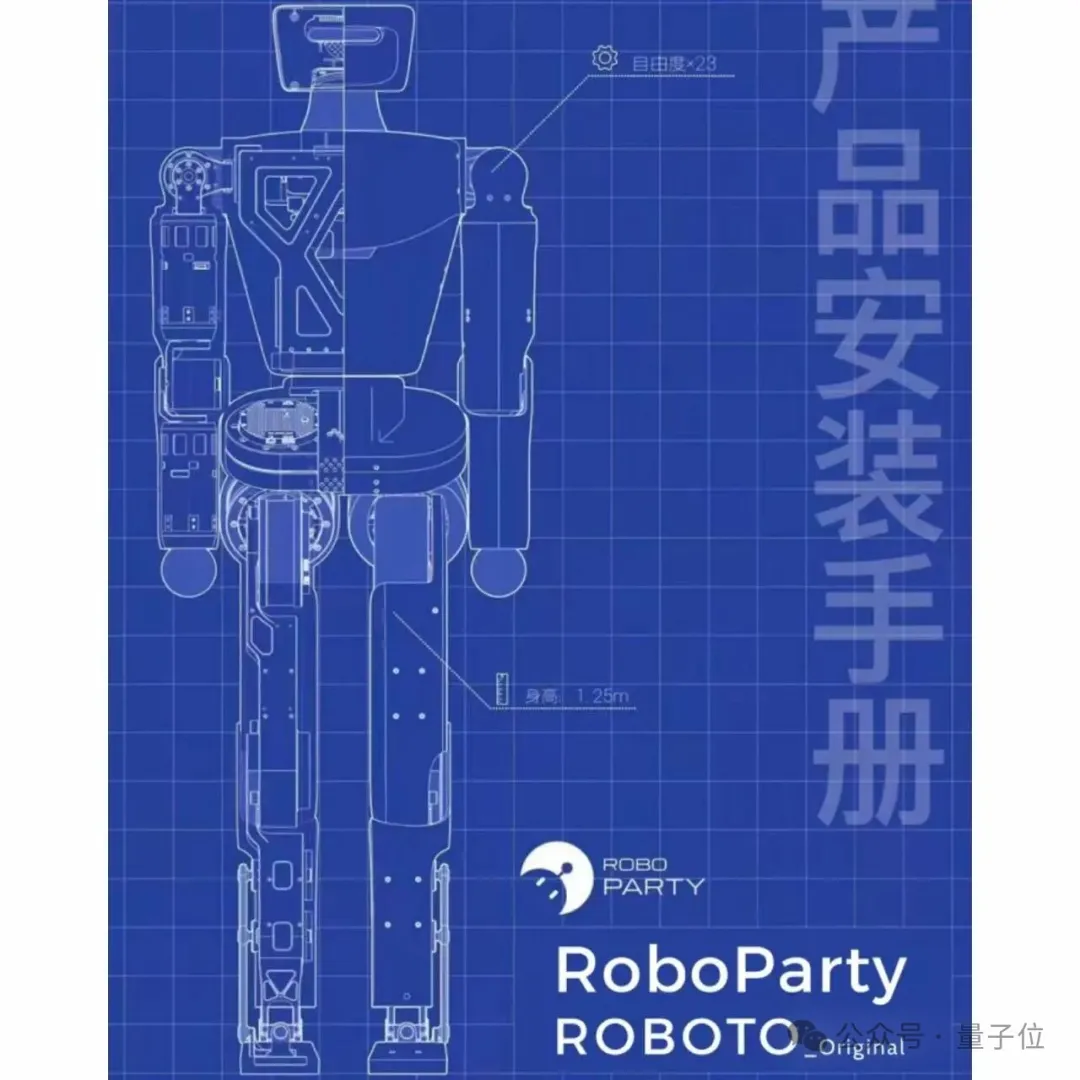
将其双足人形机器人 “萝博头原型机(Roboto_Original)”全栈、完整开源,并同步启动全球开发者共创计划。
核心指标相当硬核:
这款机器人跑步速度可达3m/s,是目前全球范围内技术成熟度领先的全开源人形机器人。
这不只是扔出几行代码,而是连同硬件结构图、EBOM物料清单、供应商名单、AMP运控算法,甚至连“避坑指南”式的Know-how知识库都一股脑全掏了出来。
目标就是为了实现“可复现、可二开、可验证”的开源。
这种对“全栈”的执着,或许源于团队骨子里的工程基因。这支成立于2025年2月、核心团队来自哈尔滨工业大学的具身新势力,野心并不止于发布一款原型机。
萝博派对希望把“从0到跑”做成行业共享的具身Infra底座——
即把路径标准化、把经验工具化、把验证流程公开化,推动行业把时间用在真正的场景与能力突破上。
全栈开源,直击人形机器人开发痛点
人形机器人真正的门槛,往往不在某一个算法点,而是体现在从设计、装配到标定、训练,再到验证与迭代这一整条系统工程链路的协同效率上。
行业长期存在着三大核心痛点:
闭源导致开发壁垒高;
设计规范缺失;
架构标准不统一。
基于此,萝博派对以“可复现、可二开、可验证”为目标,正式发布双足人形机器人“萝博头原型机”的全栈开源方案,并同步推出“动手学人形机器人问题清单”Know-how共创文档,旨在推动行业经验从“各自积累”走向“公开共享”。
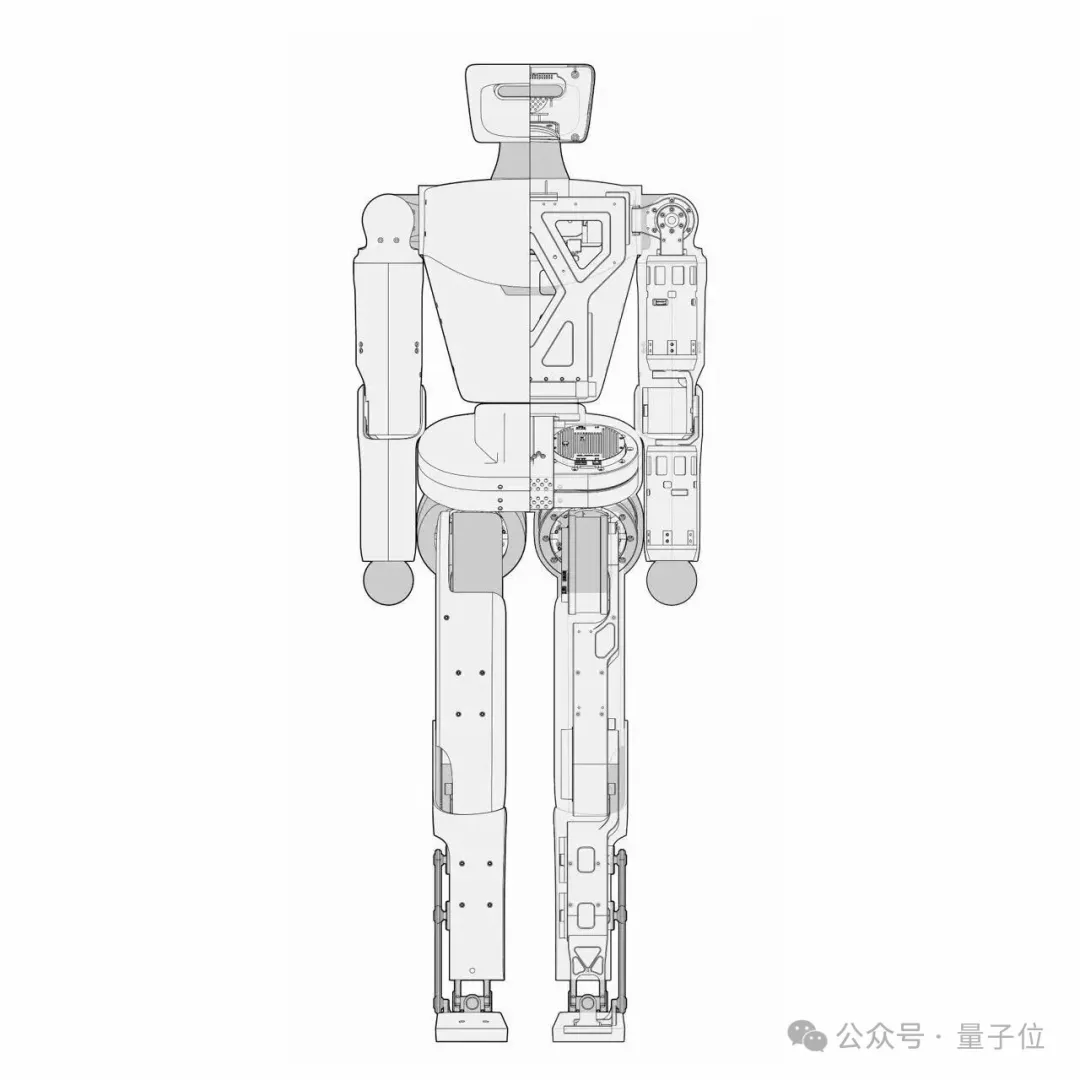
在硬件层面,萝博头原型机公开了1.2m身高、30kg重量级本体的全套结构图纸,覆盖关节排布、线束收束方案以及金属结构件选型标准等关键设计细节。
同时,项目同步开放关节模组核心参数、选型指南与拆机报告,并提供国内优质供应商清单,配套完整EBOM物料清单与SOP组装流程,从采购、装配到复现路径形成闭环,显著降低硬件研发与复刻门槛。
在软件与控制层面,项目开放了底层控制全量代码,涵盖模仿运动、感知运动与导航运动三大核心模块,并支持SMPL-X人体模型适配,使开发者能够直接复用海量人体动捕数据,减少新任务开发中的微调成本,提升能力迁移效率,缓解传统控制方案在泛化性与工程落地上的不足。
同时,萝博头原型机同步开源拟人步态的AMP运控算法代码,为步态自然度与运动稳定性的进一步迭代,提供了可直接复用的技术基础。
在工程化落地层面,萝博派对将研发过程中形成的sim2real gap弥补方案、样机测试矩阵与调试经验总结系统化公开。
并同步沉淀关键避坑要点与流程规范,帮助开发者与合作团队减少重复试错、提升调试效率,让“跑起来”不再依赖隐性经验,而是形成一套可以被复现、被验证、被持续迭代的工程流程。
与此同时,萝博派对长期建设并持续维护“动手学人形机器人问题清单”共创知识库,覆盖行业发展、硬件研发、软件研发与生产制造等关键环节,旨在将行业讨论从“表演型炫技”拉回“实用落地”。
具体来看,该知识库主张人形机器人优先解决行走稳定性、抗摔性等基础能力,并围绕尺寸、重量、散热、成本等量产关键问题展开共建。
以“全员编辑、按紧急度排序”的开放机制,将单一团队的经验沉淀升级为“全行业共建的落地指南”,推动行业从“各自试错”走向“协同突破”。
核心突破:性能与步态双达标
萝博头原型机的关键优势,在于“硬件性能”与“控制体验”的同步提升。
在运动能力上,原型机跑步速度达到3m/s级别,跻身全球全开源人形机器人第一梯队,回应了行业长期存在的“开源性能滞后于闭源”的刻板印象。
为支撑高速与稳定运行,硬件端采用类车规级本体结构与高刚性金属材料,提升力传递效率与整体结构稳定性;
同时通过模块化关节模组实现更高的扭矩密度与更快的动态响应,为跑步与复杂动作提供可靠的执行基础。
在控制体验上,萝博头原型机搭载拟人步态的AMP运控算法,作为其核心控制能力底座。