揭秘跟沈腾搭戏的“铁哥们儿”:五分钟挑战五绝活华尔街日报
2026年除夕夜,央视春晚迎来了一位特殊的表演者,银河通用机器人Galbot“盖博特”(小名“小盖”)。它不仅与沈腾、马丽同台搭戏,成了活灵活现的“男二号”、沈腾的“铁哥们儿”,还在后台走廊独立经营起了一家智慧零售商店“暖心小屋”。
与以往只按程序跳舞的机器人不同,“小盖”是春晚历史上首个“干活儿”机器人,盘核桃、捡玻璃碎片、叠衣服、串烤肠,都一气呵成,这五个看似平常的动作,其实对于机器人来说是十分高难度的动作。
更重要的是,与传统机器人表演依赖预编程不同,银河通用此次展示干活技能的实现是端到端自主感知、自主决策、自主执行,而且还特别拟人。
银河通用的核心能力,源于一条迥异于传统机器人技术的大模型路径,自主创新并应用了一条融合超大规模虚实数据端到端训练大小脑协同具身大模型的新范式:即基于自主构建的百亿级具身智能数据集,打造的全球首个集成“大脑-小脑-神经控制”于一模的全身全手端到端大模型——“银河星脑 AstraBrain”。
今天,我们就透过这些绝活,深度解密这个全身全手、大小脑端到端协同的大模型是怎么练成的。
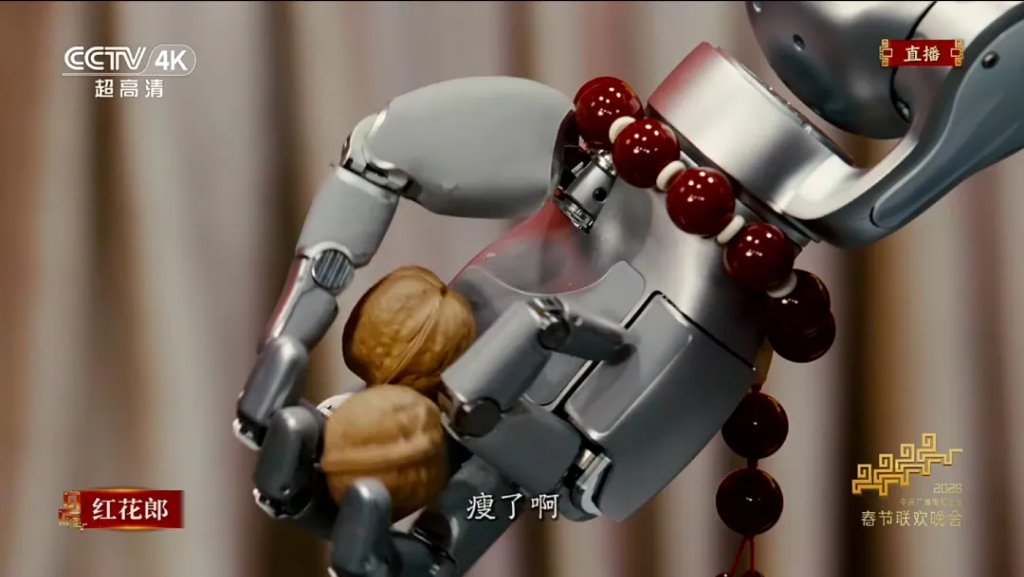
绝活一:盘核桃——AstraBrain中的小脑赋予指尖“手感”
让指尖拥有“触感” 两枚核桃在掌心旋转,难点在于核桃形状不规则、重心一直在变,手指力量稍有偏差核桃就会掉。
银河通用自主研发的 AstraBrain中的灵巧手神经动力学小脑模型,正是破解这一难题的关键。想要练好灵活盘核桃的小脑,机器人需要先是在虚拟世界里打基础,让机器手在虚拟世界里疯狂练习,系统会给它喂各种大小、重量的虚拟核桃,让它靠不断试错,练出一套适应性极强的“基础盘法”。
其次是在现实中加纠偏:因为电脑模拟和现实(比如真实的摩擦力、机械误差)总有差别,所以我们让真实的机器手去接触各种实物,积累真实的“物理手感”。等它真正在现实里盘核桃时,系统就会利用这种手感,在后台悄悄微调动作指令,把虚拟和现实的误差给补齐。简单来说,就是在虚拟世界练招式,在真实世界找手感,两者结合,机器手就能在现实里把核桃盘得十分溜了。
以下是机器人学习盘核桃的Gif示意图:
仿真中盘核桃的进化过程:
1.刚开始盘不动还总掉
2、逐步盘起来但不够流畅
3.逐渐流畅自然速度上来
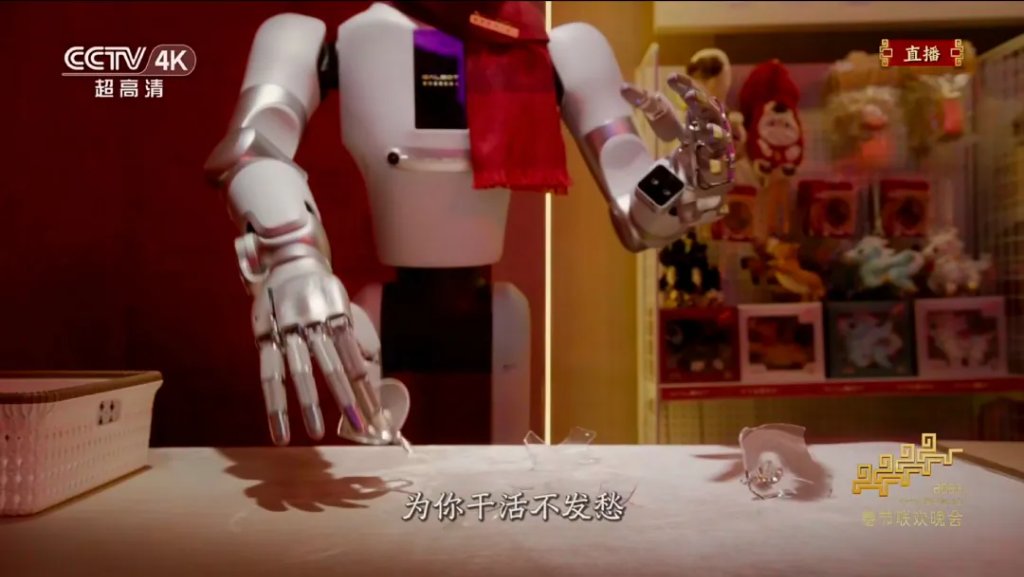
绝活二:捡玻璃碎片——AstraBrain中的大脑挑战感知极限
在春晚舞台上,“小盖”被要求从浅色桌面上捡起散落的玻璃碎片。这是一个对人类都颇具风险的精细操作,对机器人而言更是感知与控制的双重极限。
玻璃碎片的难点在于:透明物体在视觉上近乎“隐形”,尤其是放置在浅色桌面上时,其边缘、厚度、反光特征极易与环境融为一体。传统视觉算法难以准确识别透明物体的三维轮廓和位姿,更无法判断抓取点。
AstraBrain 的突破在于,通过在仿真环境中生成海量的透明物体数据——不同厚度、不同碎裂形状、不同光照条件下的玻璃碎片——让机器人在虚拟世界中“见过”各种可能的透明形态。结合多模态感知融合技术,“小盖”能够从微弱的反光边缘和阴影变化中“看见”玻璃的存在,并精准规划抓取策略。
更关键的是,模型赋予的力觉反馈让它在接触玻璃时能够感知到硬度和滑动趋势,以恰到好处的力度稳稳捏起碎片,既不会捏碎,也不会滑落。这一能力,为机器人在家庭清洁、工业回收等场景中的透明物体处理打开了全新可能。
绝活三:货架取货——AstraBrain大小脑协同在动态环境中精准抓取
在春晚舞台上,“小盖”需要从货架上取下一瓶矿泉水。这看似简单的动作,其实暗藏玄机——水瓶被紧密排列在货架层板之间,周围商品间距极小,稍有不慎便会碰倒邻品或抓取失败。
这要求机器人必须同时处理三重难题:一是通过大脑精准判断水瓶在货架上的位置;二是用拟人的动作伸手拿到水瓶,并过程中不能碰倒周围的商品;三是灵巧操作,水瓶上半身较细、下半身较粗,且通常被紧密卡位,直接平移取出极易卡顿。
AstraBrain 的强化学习框架让“小盖”在虚拟世界中经历了亿万次“取货试错”:碰到旁边商品扣分,成功取下加分。经过这样的自我博弈,它“悟”出了一条人类都未必想到的最优路径——先以灵巧的手指轻轻扣住水瓶上半身的瓶盖处,微微倾斜以避让两侧邻品,感知到阻力后顺势调整角度,再稳稳向外抽出。
这一过程不是预设轨迹,而是实时决策的结果。每一次扣动、每一次倾斜、每一次抓取,都是机器人在毫秒级时间内根据当前环境做出的自主判断。
绝活四:叠衣服——AstraBrain对柔性物体的泛化灵巧操作
叠衣服被认为是机器人操作领域的最大的命题之一:因为衣服是柔性的,没有固定形状,每一次拿起来的状态都完全不同。
春晚现场,“小盖”面对的是随机摆放的T恤,没有预设的折叠轨迹,没有固定的抓取点。它需要实时判断布料当前的褶皱状态,预测折叠后的形态,并规划出一系列抓、拉、折、压的动作序列。